Cosimir Software merupakan salah satu aplikasi pemograman robot yang digunakan sebagai bahan pelajaran pada lingkungan pendidikan. Admin akan membagikan sedikit tentang cara menggunakan Aplikasi Cosimir. Adapun langkahnya sebagai Berikut :
Buka aplikasi Cosimir, kemudian pilih Project Wizard untuk membuat shell kerja baru.
link Aplikasi Cosimir : (ada dibawah)

Muncul dialog box project Wizard :
Project Name : Dewa Robot
Program Name : Dewa 1
Created by : Toron & Danto
Initial : MEKA

Selesai tekan tombol Next , muncul dialog box selanjutnya

Pilih tipe RV-M1, I/O Interface Cards 1 kemudian tekan tombol Finish. Maka akan muncul tampilan berikut :

Pilih perintah model libraries pada Tab "execute" , maka akan muncul tampilan . pilih Miscellaneous Primitive kemudian pilih Box dan tekan Add.

Pada Tab Excute , pilih Model explorer .

Klik Object, kemudian pilih Box/tumpuan1 kemudian klik kanan, pilih Properties. Dan atur ukuran dimensi, posisi, dan warna yang diinginkan dari tab visualisasi.
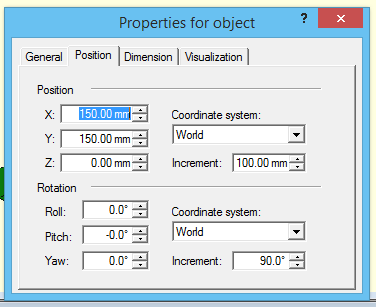
Atur posisi : Dimensi:
X : 150.00 mm X :150.00mm
Y : 150.00 mm Y :150.00mm
Z : 0.00 mm Z :150.00mm
Atur warna sesuai kebutuhan

Ulangi langkah sebelumnya untuk memasukan tumpuan 2.
Posisi : Dimensi :
X : -300.00 mm X :150.00mm
Y : 150.00 mm Y :150.00mm
Z : 0.00 mm Z :150.00mm
Atur warna sesuai kemauan
Kemudian masukan silinder dengan cara yang saat memasukan Box. Atur posisi dan dimensi sbb :
X : 225.00 mm X :50.00mm
Y : 225.00 mm Y :50.00mm
Z : 150.00 mm Z :100.00mm
Atur warna sesuai kemauan sehingga tampilan akan sbb:

Agar benda dapat diambil oleh gripper maka perlu ditentuka Grip pointnyadengan cara :
a. Klik 2 kali pada Benda(silinder) pada Object dialog Box Model Explorer sehigga muncul Base.
b. Pada base klik kanan pilih New. Kemudian pilih Grip Point yang berada dibawah Base.

Jika dipilih Grip Point maka layar disebelah kanan akan muncul Grippoint_1, atur posisi grippoint_1 dari menu Properties sbb:
X : 0 mm
Y : 0 mm
Z : 50 mm


Untuk Proses Pemrograman Robot adalah sebagai berikut :
Memasukan posisi Robot
- Pada tab Extra klik kemudian pilih perintah Teach In (F8).

- Aturlah posisi dari gerakan robot dengan : XYZ Jog (gerakan Pinggang Robot ),JOINT Jog atau TOOL Jog, kemudiaan atur sesuai dengan keinginan robot yang akan digerakkan.
Program robot dari posisi yang telah diingat
Perintah pemrograman Dasar.
a. SP (speed)
digunakan untuk mengatur kecepatan saat start dan stop.
Dengan Input Format : SP<Speed Level>,[<H atau L>]
Range Min/Max : 0 – 9
Contoh Program :
10 SP 3, L
b. MO(Move)
digunakan untuk menggerakan ujung tangan robot yag telah ditentukan.
Range Min/Max: 1 – 629
Contoh Program :
10 SP 5 : Set kecepatan pada 5
20 MO 20, C : Bergerak ke posisi 20 dengan tangan tertutup
30 ED : Akhir Program
c. GC(Grip Close) atau GO (Grip Open)
digunakan untuk membuka dan menutup Gripper dengan gaya cekam yang sudah ditentukan.
Contoh Program :
10 SP 7 : Set kecepatan pada 7
20 MO 10, O : bergerak ke posisi 10 dengen Gripper terbuka
30 TI 5 : Timer 0, 5 detik
40 GC : Gripper tertutup
50 TI 5 : Set Waktu 0,5 detik
60 ED : Akhir Program
d. TI (Timer)
Menahan gerakan selama waktu yang telah ditentukan
Range MIN/MAX : 0 - 32767
Contoh Program :
10 SP 5 : Set kecepatan pada 5
20 MO 1, O : Bergerak ke Posisi 1 dengan ggripper terbuka
30 TI 5 : Timer 0,5 detik
40 GC : Gripper Tertutup
50 TI 5 : Set Waktu 0,5 Detik
e. ED (END)
Digunakan untuk mengakhiri program.
Contoh Program :
10 SP 5 : Set Kecepatan pada 5
20 MO 3, O : Bergerak ke posisi 3 dengan Gripper terbuka
30 MO 4, O : Bergerak Ke Posisi 4 Gripper terbuka
40 ED : Akhiri Program
Menjalankan Program
Agar program dapat disimulasikan pada shell kerja, maka setelah program selesai dikerjakan , program harus decompile dan link program dengan perintah Compile + Link, dari Pull Down Menu Execute. Setelah itu pilih Start pada tab Menu Execute untuk menjalankan Program.
Sekian Tutorial dari saya semoga bermanfaat.
Link Download
Password : k*rm*t*r*ng*nt*ng